TimeAchine

人間の歩行動作を行うSCARA型ロボットを用いて、時間と空間からの脱却を表現する。
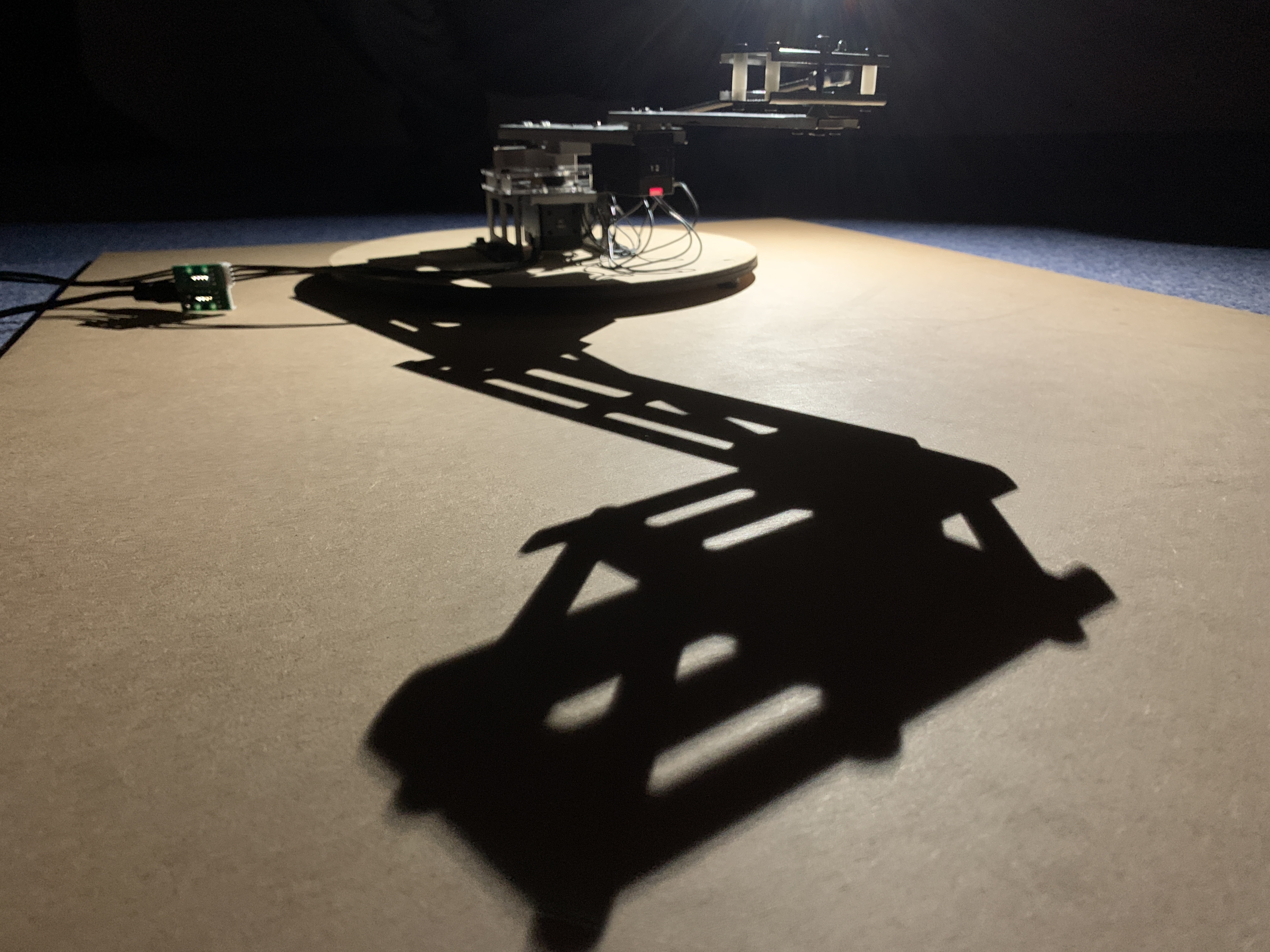
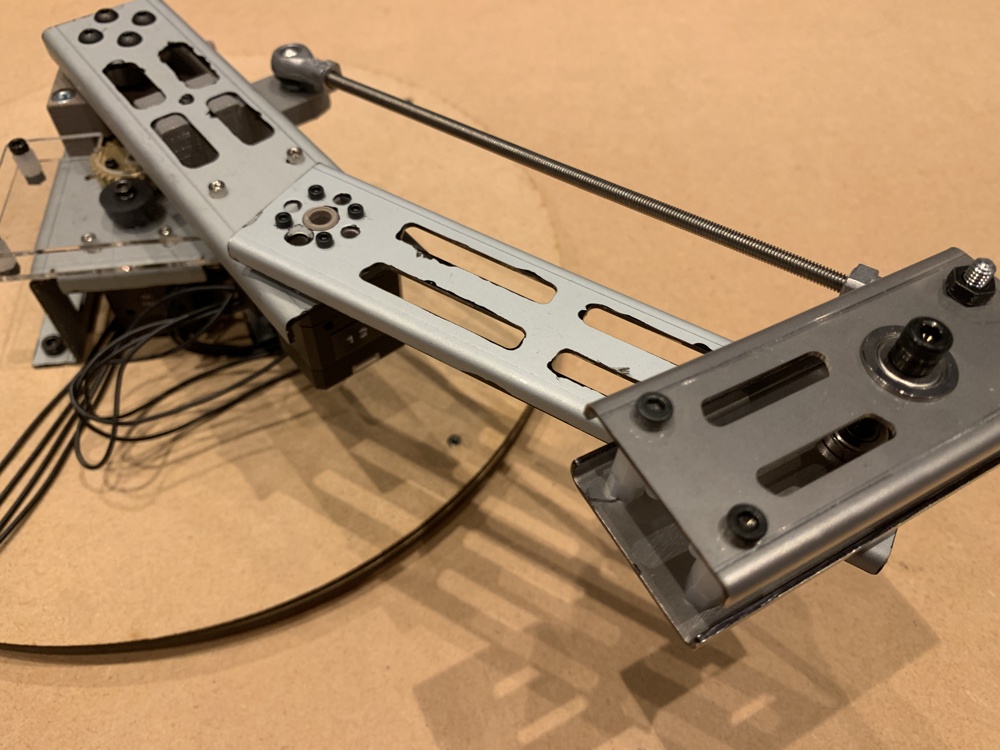
人間の腰関節と膝関節をサーボモーターに、足首の関節を平行リンクに置き換えることで、ロボットアームを用いて人間の歩行動作を再現した。さらに歩行モーションを再生中のアームを上部から光源で照らすことによって、脚全体の大きさや各部分のプロポーションを動的に変化させる。

人間の歩行動作を行うSCARA型ロボットを用いて、時間と空間からの脱却を表現する。
人間の腰関節と膝関節をサーボモーターに、足首の関節を平行リンクに置き換えることで、ロボットアームを用いて人間の歩行動作を再現した。さらに歩行モーションを再生中のアームを上部から光源で照らすことによって、脚全体の大きさや各部分のプロポーションを動的に変化させる。