Unity ROS Action Planner
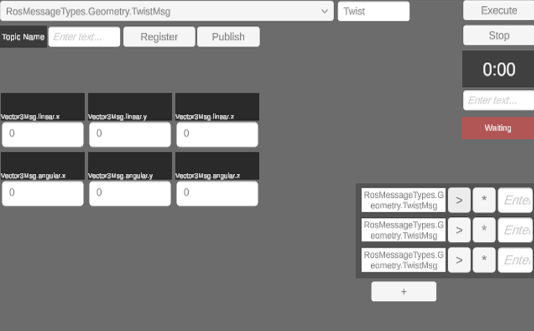
UnityからROSのトピックに任意のメッセージを送信するためのインターフェースを実装した。
UnityとROSの通信にはUnity-Robotics-Hubに含まれるROS-TCP-EndpointとROS-TCP-Connectorを使用した。 任意のメッセージ型を選択して、プロパティの値とトピック名を指定するとメッセージを送信できる。シーケンスに対応しており、指定秒数ごとに送信するメッセージをプログラムすることもできる。