TETSURO OKUYA
Toggle navigation
About
Works
Tag:ROS
Amplified Pendulum: ロール方向の曲線運動における曲率増幅とそ …
実空間よりも急峻な曲線軌道に沿って運動するように知覚させるVRアトラクションの検討および開発を行った。
Amplified Pendulum: オプティカルフローを用いた上半身のロール …
上半身のロール方向の傾斜運動に対してリダイレクション操作で用いられる回転ゲインを適用し、実空間よりも大きく回転する錯覚を調査した。
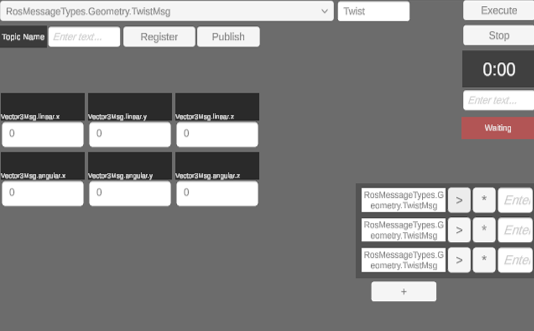
Unity ROS Action Planner
UnityからROSのトピックに任意のメッセージを送信するためのインターフェースを実装した。
移動ロボットを用いた広域・高解像度な凹凸地図の構築
移動ロボットとVIOを用いて、地面の数mm程度の凹凸の情報を含む触覚地図を構築する触覚センシングシステムを開発した。